In this project, you’ll learn how to build a Wi-Fi-controlled surveillance car using the ESP32-CAM module. It streams live grayscale video and can be controlled remotely from any smartphone or computer browser — no apps required!
Features
- Live grayscale video stream over Wi-Fi
- Web-based motor control interface (Forward, Backward, Left, Right, Stop)
- Built with ESP32-CAM (low-cost, compact module)
- Uses L298N motor driver
- Control and view from any device on the same network
Components Required
| Component | Quantity |
|---|---|
| ESP32-CAM module (AI Thinker) | 1 |
| FTDI USB-to-Serial Adapter | 1 |
| L298N or HW-130 Motor Driver | 1 |
| DC Geared Motors + Wheels | 2 |
| Chassis + Battery Holder | 1 |
| 18650 Battery or 7.4V LiPo | 1 |
| Jumper Wires | Several |
| Optional: LEDs or buzzer | Optional |
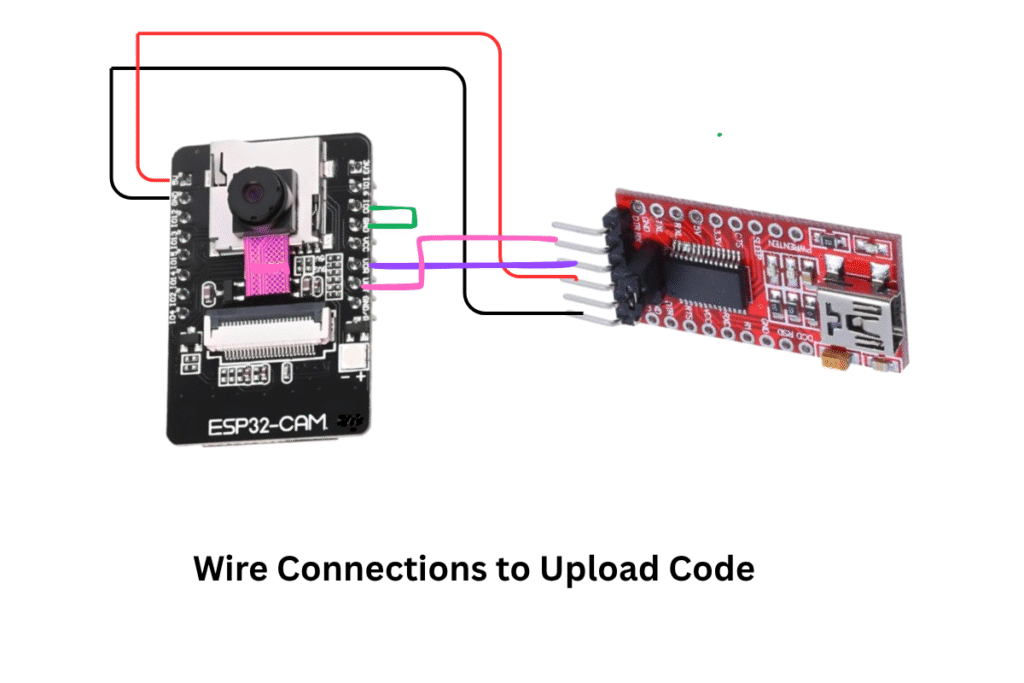
ESP32-CAM And FTDI Wire Connections Diagram:
Motor Driver Wiring Details and Diagram:
| ESP32-CAM GPIO | Motor Driver |
|---|---|
| GPIO 12 | IN1 |
| GPIO 13 | IN2 |
| GPIO 14 | IN3 |
| GPIO 15 | IN4 |
| 5V | ENA (via jumper) |
| 5V | ENB (via jumper) |
| GND | GND (shared with motor GND) |
Don’t forget: Place jumper caps on ENA and ENB if not using PWM.
Motor Driver, ESP32 CAM and Battery Wire Connection Diagram:
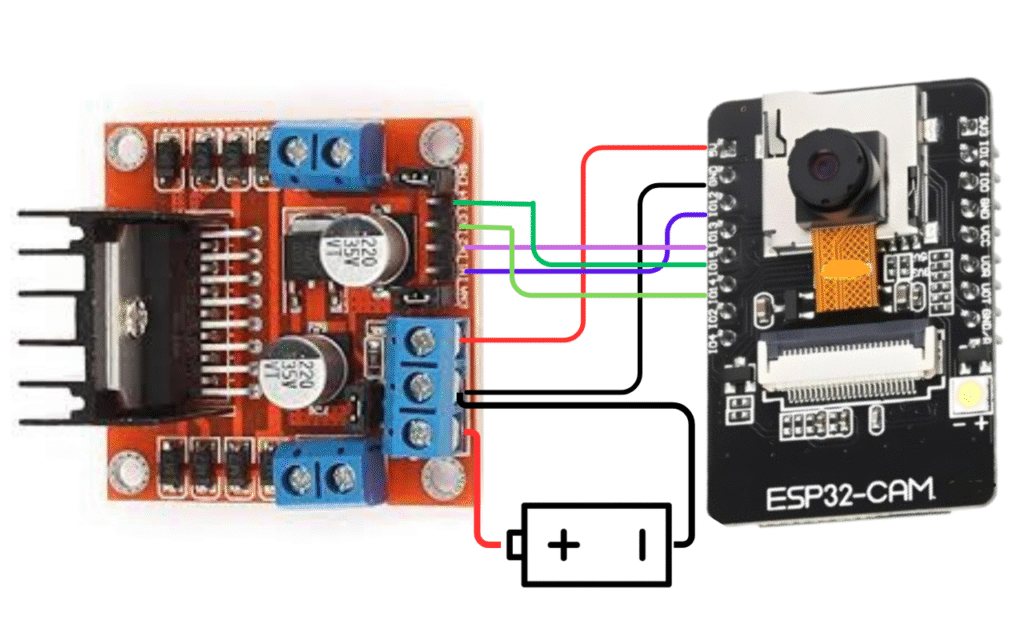
Power:
- ESP32-CAM powered via FTDI (for programming) and 5V regulator or battery
- Motor Driver powered by separate battery (6–12V)
Software Setup
1. Install ESP32 Board Support in Arduino IDE
- Go to File > Preferences → Paste these URLs in “Additional Board URLs”:
https://dl.espressif.com/dl/package_esp32_index.json
https://raw.githubusercontent.com/espressif/arduino-esp32/gh-pages/package_esp32_index.json
- Go to Tools > Board > Board Manager → Search “ESP32” → Install
2. Select:
- Board: AI Thinker ESP32-CAM
- Partition Scheme: Default 4MB with SPIFFS
- PSRAM: Enabled (if available)
Code:
#include "esp_camera.h"
#include <WiFi.h>
#include <WebServer.h>
// Wi-Fi credentials
const char* ssid = "YOUR_SSID";
const char* password = "YOUR_PASSWORD";
// Motor driver pins (L298N / HW-130)
#define IN1 12
#define IN2 13
#define IN3 14
#define IN4 15
WebServer controlServer(80);
WiFiServer streamServer(81);
// ESP32-CAM AI Thinker pin config
#define PWDN_GPIO_NUM 32
#define RESET_GPIO_NUM -1
#define XCLK_GPIO_NUM 0
#define SIOD_GPIO_NUM 26
#define SIOC_GPIO_NUM 27
#define Y9_GPIO_NUM 35
#define Y8_GPIO_NUM 34
#define Y7_GPIO_NUM 39
#define Y6_GPIO_NUM 36
#define Y5_GPIO_NUM 21
#define Y4_GPIO_NUM 19
#define Y3_GPIO_NUM 18
#define Y2_GPIO_NUM 5
#define VSYNC_GPIO_NUM 25
#define HREF_GPIO_NUM 23
#define PCLK_GPIO_NUM 22
// ===== Motor Control =====
void stopMotors() {
digitalWrite(IN1, LOW); digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW); digitalWrite(IN4, LOW);
}
void moveForward() {
digitalWrite(IN1, HIGH); digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH); digitalWrite(IN4, LOW);
}
void moveBackward() {
digitalWrite(IN1, LOW); digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW); digitalWrite(IN4, HIGH);
}
void turnLeft() {
digitalWrite(IN1, LOW); digitalWrite(IN2, HIGH);
digitalWrite(IN3, HIGH); digitalWrite(IN4, LOW);
}
void turnRight() {
digitalWrite(IN1, HIGH); digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW); digitalWrite(IN4, HIGH);
}
// ===== Web Control UI =====
void handleRoot() {
controlServer.send(200, "text/html", R"rawliteral(
<html><head>
<meta name="viewport" content="width=device-width, initial-scale=1">
<title>ESP32 Surveillance Car</title>
<style>
button { width: 80px; height: 50px; font-size: 16px; margin: 5px; }
.btns { display: flex; flex-wrap: wrap; justify-content: center; }
img { width: 100%; max-width: 480px; }
</style>
</head><body>
<h2 align="center">ESP32 Surveillance Car</h2>
<div align="center">
<img src="http://)rawliteral" + WiFi.localIP().toString() + R"rawliteral(:81/stream">
</div>
<div class="btns">
<button onclick="send('F')">Forward</button><br>
<button onclick="send('L')">Left</button>
<button onclick="send('S')">Stop</button>
<button onclick="send('R')">Right</button><br>
<button onclick="send('B')">Backward</button>
</div>
<script>
function send(cmd) {
fetch("/control?move=" + cmd);
}
</script>
</body></html>
)rawliteral");
}
// ===== Command Handler =====
void handleControl() {
String move = controlServer.arg("move");
Serial.println("Received command: " + move);
if (move == "F") moveForward();
else if (move == "B") moveBackward();
else if (move == "L") turnLeft();
else if (move == "R") turnRight();
else stopMotors();
controlServer.send(204, "", "");
}
// ===== Camera Setup (Grayscale) =====
void startCamera() {
camera_config_t config;
config.ledc_channel = LEDC_CHANNEL_0;
config.ledc_timer = LEDC_TIMER_0;
config.pin_d0 = Y2_GPIO_NUM; config.pin_d1 = Y3_GPIO_NUM;
config.pin_d2 = Y4_GPIO_NUM; config.pin_d3 = Y5_GPIO_NUM;
config.pin_d4 = Y6_GPIO_NUM; config.pin_d5 = Y7_GPIO_NUM;
config.pin_d6 = Y8_GPIO_NUM; config.pin_d7 = Y9_GPIO_NUM;
config.pin_xclk = XCLK_GPIO_NUM;
config.pin_pclk = PCLK_GPIO_NUM;
config.pin_vsync = VSYNC_GPIO_NUM;
config.pin_href = HREF_GPIO_NUM;
config.pin_sscb_sda = SIOD_GPIO_NUM;
config.pin_sscb_scl = SIOC_GPIO_NUM;
config.pin_pwdn = PWDN_GPIO_NUM;
config.pin_reset = RESET_GPIO_NUM;
config.xclk_freq_hz = 20000000;
config.pixel_format = PIXFORMAT_GRAYSCALE;
config.frame_size = FRAMESIZE_CIF; // 352x288
config.jpeg_quality = 12;
config.fb_count = 1;
esp_err_t err = esp_camera_init(&config);
if (err != ESP_OK) {
Serial.printf("Camera init failed: 0x%x\n", err);
while (true);
}
}
// ===== Streaming Task =====
void streamVideo() {
WiFiClient client = streamServer.available();
if (!client) return;
client.println("HTTP/1.1 200 OK");
client.println("Content-Type: multipart/x-mixed-replace; boundary=frame");
client.println();
while (client.connected()) {
camera_fb_t *fb = esp_camera_fb_get();
if (!fb) continue;
uint8_t* jpg_buf = NULL;
size_t jpg_len = 0;
bool converted = frame2jpg(fb, 40, &jpg_buf, &jpg_len);
if (converted) {
client.printf("--frame\r\nContent-Type: image/jpeg\r\nContent-Length: %u\r\n\r\n", jpg_len);
client.write(jpg_buf, jpg_len);
client.println();
free(jpg_buf);
}
esp_camera_fb_return(fb);
delay(30); // frame delay
}
}
// Task to run streamVideo() independently
void streamTask(void* pvParameters) {
while (true) {
streamVideo();
vTaskDelay(1); // avoid watchdog timeout
}
}
void setup() {
Serial.begin(115200);
// Motor pin setup
pinMode(IN1, OUTPUT); pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT); pinMode(IN4, OUTPUT);
stopMotors();
// Connect Wi-Fi
WiFi.begin(ssid, password);
Serial.print("Connecting to WiFi");
while (WiFi.status() != WL_CONNECTED) {
delay(500); Serial.print(".");
}
Serial.println("\nWiFi connected!");
Serial.print("Control page: http://"); Serial.println(WiFi.localIP());
Serial.print("Stream page: http://"); Serial.print(WiFi.localIP()); Serial.println(":81/stream");
// Camera + servers
startCamera();
controlServer.on("/", handleRoot);
controlServer.on("/control", handleControl);
controlServer.begin();
streamServer.begin();
// Launch camera stream task on core 0
xTaskCreatePinnedToCore(
streamTask, // Function
"streamTask", // Name
8192, // Stack size
NULL, // Param
1, // Priority
NULL, // Handle
0 // Core 0
);
}
void loop() {
controlServer.handleClient(); // only handles motor control
}
How It Works
- The ESP32-CAM hosts a video stream at
http://<ESP_IP>:81/stream - It also hosts a control UI at
http://<ESP_IP>with motor buttons - Clicking the buttons sends HTTP requests (
/control?move=F, etc.) - ESP32 processes these to control motors via GPIO 12–15
Usage
- Upload code using FTDI
- Power the car (ESP32 and motor driver)
- Open Serial Monitor at 115200 → Get IP
- Open browser on phone or PC:
- Stream page:
http://<IP>:81/stream - Control page:
http://<IP>
- Stream page:
Add screenshots of:
- Serial monitor showing IP
- Web UI on phone
- Camera stream output
Troubleshooting
| Problem | Fix |
|---|---|
| Motors run but don’t stop | Check IN1–IN4 wiring & stopMotors() call |
| Motors don’t move at all | Connect ENA/ENB to 5V (jumper caps) |
| ESP32 reboots or crashes | Ensure proper power supply & grounding |
| Camera fails with error 0x106 | Use PIXFORMAT_GRAYSCALE instead of JPEG |
| Control UI unresponsive during streaming | Use FreeRTOS task for stream |
Ideas to Improve
- Add PWM speed control
- Add obstacle avoidance using ultrasonic sensors
- Add voice command control via browser
- Record stream to SD card or capture photos
- Turn this into a security patrol robot
Conclusion
This surveillance car is a fun and powerful IoT project that combines video streaming, robotics, and web technology — all running on a single ESP32-CAM!